From Surf Wiki (app.surf) — the open knowledge base
Linear dynamical system
Type of mathematical system
Type of mathematical system
Linear dynamical systems are dynamical systems whose evolution functions are linear. While dynamical systems, in general, do not have closed-form solutions, linear dynamical systems can be solved exactly, and they have a rich set of mathematical properties. Linear systems can also be used to understand the qualitative behavior of general dynamical systems, by calculating the equilibrium points of the system and approximating it as a linear system around each such point.
Introduction
In a linear dynamical system, the variation of a state vector (an N-dimensional vector denoted \mathbf{x}) equals a constant matrix (denoted \mathbf{A}) multiplied by \mathbf{x}. This variation can take two forms: either as a flow, in which \mathbf{x} varies continuously with time
: \frac{d}{dt} \mathbf{x}(t) = \mathbf{A} \mathbf{x}(t)
or as a mapping, in which \mathbf{x} varies in discrete steps
: \mathbf{x}{m+1} = \mathbf{A} \mathbf{x}{m}
These equations are linear in the following sense: if \mathbf{x}(t) and \mathbf{y}(t) are two valid solutions, then so is any linear combination of the two solutions, e.g., \mathbf{z}(t) \ \stackrel{\mathrm{def}}{=}\ \alpha \mathbf{x}(t) + \beta \mathbf{y}(t) where \alpha and \beta are any two scalars. The matrix \mathbf{A} need not be symmetric.
Linear dynamical systems can be solved exactly, in contrast to most nonlinear ones. Occasionally, a nonlinear system can be solved exactly by a change of variables to a linear system. Moreover, the solutions of (almost) any nonlinear system can be well-approximated by an equivalent linear system near its fixed points. Hence, understanding linear systems and their solutions is a crucial first step to understanding the more complex nonlinear systems.
Solution of linear dynamical systems
If the initial vector \mathbf{x}{0} \ \stackrel{\mathrm{def}}{=}\ \mathbf{x}(t=0) is aligned with a right eigenvector \mathbf{r}{k} of the matrix \mathbf{A}, the dynamics are simple
: \frac{d}{dt} \mathbf{x}(t) = \mathbf{A} \mathbf{r}{k} = \lambda{k} \mathbf{r}_{k}
where \lambda_{k} is the corresponding eigenvalue; the solution of this equation is : \mathbf{x}(t) = \mathbf{r}{k} e^{\lambda{k} t} as may be confirmed by substitution.
If \mathbf{A} is diagonalizable, then any vector in an N-dimensional space can be represented by a linear combination of the right and left eigenvectors (denoted \mathbf{l}_{k}) of the matrix \mathbf{A}.
: \mathbf{x}{0} = \sum{k=1}^{N} \left( \mathbf{l}{k} \cdot \mathbf{x}{0} \right) \mathbf{r}_{k}
Therefore, the general solution for \mathbf{x}(t) is a linear combination of the individual solutions for the right eigenvectors : \mathbf{x}(t) = \sum_{k=1}^{n} \left( \mathbf{l}{k} \cdot \mathbf{x}{0} \right) \mathbf{r}{k} e^{\lambda{k} t}
Similar considerations apply to the discrete mappings.
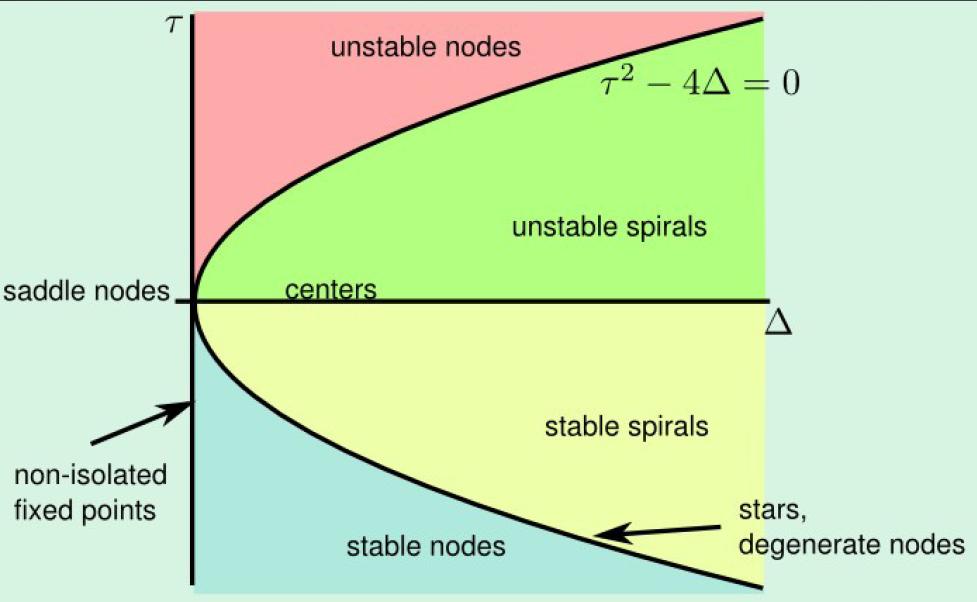
Classification in two dimensions
The roots of the characteristic polynomial det(A - λI) are the eigenvalues of A. The sign and relation of these roots, \lambda_n, to each other may be used to determine the stability of the dynamical system : \frac{d}{dt} \mathbf{x}(t) = \mathbf{A} \mathbf{x}(t). For a 2-dimensional system, the characteristic polynomial is of the form \lambda^2-\tau\lambda+\Delta=0 where \tau is the trace and \Delta is the determinant of A. Thus the two roots are in the form: :\lambda_1=\frac{\tau+\sqrt{\tau^2-4\Delta}}{2} :\lambda_2=\frac{\tau-\sqrt{\tau^2-4\Delta}}{2}, and \Delta=\lambda_1\lambda_2 and \tau=\lambda_1+\lambda_2. Thus if \Delta then the eigenvalues are of opposite sign, and the fixed point is a saddle. If \Delta0 then the eigenvalues are of the same sign. Therefore, if \tau0 both are positive and the point is unstable, and if \tau then both are negative and the point is stable. The discriminant will tell you if the point is nodal or spiral (i.e. if the eigenvalues are real or complex).
Linear systems and higher-order differential equations
Linearizing nonlinear systems
--
This article was imported from Wikipedia and is available under the Creative Commons Attribution-ShareAlike 4.0 License. Content has been adapted to SurfDoc format. Original contributors can be found on the article history page.
Ask Mako anything about Linear dynamical system — get instant answers, deeper analysis, and related topics.
Research with MakoFree with your Surf account
Create a free account to save articles, ask Mako questions, and organize your research.
Sign up freeThis content may have been generated or modified by AI. CloudSurf Software LLC is not responsible for the accuracy, completeness, or reliability of AI-generated content. Always verify important information from primary sources.
Report