From Surf Wiki (app.surf) — the open knowledge base
Continuous-wave radar
Type of radar where a known stable frequency continuous wave radio energy is transmitted

Type of radar where a known stable frequency continuous wave radio energy is transmitted
| image-width = 400 Continuous-wave radar (CW radar) is a type of radar system in which radio energy of a known stable frequency is transmitted continuously and then received from any reflecting objects. Individual objects can be detected using the Doppler effect, which causes the received signal to have a different frequency from the transmitted signal, allowing it to be detected by filtering out the transmitted frequency.
Doppler analysis of radar returns can allow the filtering out of slow or non-moving objects, thus offering immunity to interference from large stationary objects and slow-moving clutter. This makes it particularly useful for looking for objects against a background reflector, for instance, allowing a high-flying aircraft to look for aircraft flying at low altitudes against the background of the surface. Because the very strong reflection off the surface can be filtered out, the much smaller reflection from a target can still be seen.
CW radar systems are used at both ends of the range spectrum.
- Inexpensive radio-altimeters, proximity sensors and sports accessories that operate from a few dozen feet to several kilometres
- Costly early-warning CW angle track (CWAT) radar operating beyond 100 km for use with surface-to-air missile systems
Operation
The main advantage of CW radar is that energy is not pulsed so these are much simpler to manufacture and operate. They have no minimum or maximum range, although the broadcast power level imposes a practical limit on range. Continuous-wave radar maximize total power on a target because the transmitter is broadcasting continuously.
The military uses continuous-wave radar to guide semi-active radar homing (SARH) air-to-air missiles, such as the U.S. AIM-7 Sparrow and the Standard missile family. The launch aircraft illuminates the target with a CW radar signal, and the missile homes in on the reflected radio waves. Since the missile is moving at high velocities relative to the aircraft, there is a strong Doppler shift. Most modern air combat radars, even pulse Doppler sets, have a CW function for missile guidance purposes.
Maximum distance in a continuous-wave radar is determined by the overall bandwidth and transmitter power. This bandwidth is determined by two factors.
- Transmit energy density (watts per Hertz)
- Receiver filter size (bandwidth divided by the total number of filters)
Doubling transmit power increases distance performance by about 20%. Reducing the total FM transmit noise by half has the same effect.
Frequency domain receivers used for continuous-wave Doppler radar receivers are very different from conventional radar receivers. The receiver consists of a bank of filters, usually more than 100. The number of filters determines the maximum distance performance.
Doubling the number of receiver filters increases distance performance by about 20%. Maximum distance performance is achieved when receiver filter size is equal to the maximum FM noise riding on the transmit signal. Reducing receiver filter size below average amount of FM transmit noise will not improve range performance.
A CW radar is said to be matched when the receiver filter size matches the RMS bandwidth of the FM noise on the transmit signal.
Types
There are two types of continuous-wave radar: unmodulated continuous-wave and modulated continuous-wave.
Unmodulated continuous-wave
This kind of radar can cost less than $10 (2021). Return frequencies are shifted away from the transmitted frequency based on the Doppler effect when objects are moving. There is no way to evaluate distance. This type of radar is typically used with competition sports, like golf, tennis, baseball, NASCAR racing, and some smart-home appliances including light-bulbs and motion sensors.
The Doppler frequency change depends on the speed of light in the air (c’ ≈ c/1.0003 is slightly slower than in vacuum) and the speed of the target v:
:f_r = f_t \left( \frac{1+v/c'}{1-v/c'} \right)
The Doppler frequency is thus:
:f_d = f_r-f_t = 2v \frac {f_t}{c'-v}
Since the usual variation of targets' speed of a radar is much smaller than c', (v \ll c'), it is possible to simplify with c'-v \approx c' :
:f_d \approx 2v \frac {f_t}{c'}
Continuous-wave radar without frequency modulation (FM) only detects moving targets, as stationary targets (along the line of sight) will not cause a Doppler shift. Reflected signals from stationary and slow-moving objects are masked by the transmit signal, which overwhelms reflections from slow-moving objects during normal operation.
Modulated continuous-wave
Frequency-modulated continuous-wave radar (FM-CW)also called continuous-wave frequency-modulated (CWFM) radar Jim Lesurf. "Improved forms of radar". accessdate=2014-01-24. is short-range measuring radar capable of determining distance. This increases reliability by providing distance measurement along with speed measurement, which is essential when there is more than one source of reflection arriving at the radar antenna. This kind of radar is often used as "radar altimeter" to measure the exact height during the landing procedure of aircraft. It is also used as early-warning radar, wave radar, and proximity sensors. Doppler shift is not always required for detection when FM is used. While early implementations, such as the APN-1 Radar Altimeter of the 1940s, were designed for short ranges, Over The Horizon Radars (OTHR) such as the Jindalee Operational Radar Network (JORN) are designed to survey intercontinental distances of some thousands of kilometres.
In this system the transmitted signal of a known stable frequency continuous wave varies up and down in frequency over a fixed period of time by a modulating signal. Frequency difference between the receive signal and the transmit signal increases with delay, and hence with distance. This smears out, or blurs, the Doppler signal. Echoes from a target are then mixed with the transmitted signal to produce a beat signal which will give the distance of the target after demodulation.
A variety of modulations are possible, the transmitter frequency can slew up and down as follows:
- Sine wave, like air raid siren
- Sawtooth wave, like the chirp from a bird
- Triangle wave, like police siren in the United States
- Square wave, like police siren in the United Kingdom
Range demodulation is limited to a quarter wavelength of the transmit modulation. Instrumented range for 100 Hz FM would be 500 km. That limit depends upon the type of modulation and demodulation. The following generally applies.
:\text{Instrumented Range} = F_r-F_t = \frac {\text{Speed of Light}}{(4 \times \text{Modulation Frequency})}
The radar will report incorrect distance for reflections from distances beyond the instrumented range, such as from the moon. FMCW range measurements are only reliable to about 60% of the instrumented range, or about 300 km for 100 Hz FM.
Sawtooth frequency modulation
Sawtooth modulation is the most used in FM-CW radars where range is desired for objects that lack rotating parts. Range information is mixed with the Doppler velocity using this technique. Modulation can be turned off on alternate scans to identify velocity using unmodulated carrier frequency shift. This allows range and velocity to be found with one radar set. Triangle wave modulation can be used to achieve the same goal.
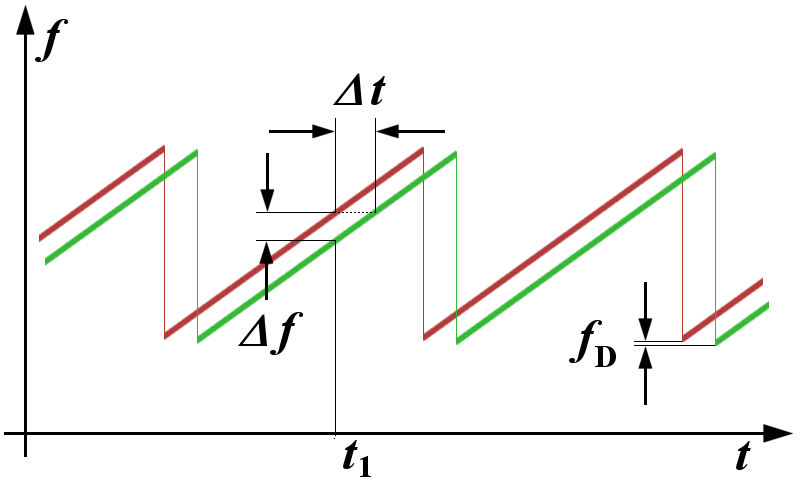
As shown in the figure, the received waveform (green) is simply a delayed replica of the transmitted waveform (red). The transmitted frequency is used to down-convert the receive signal to baseband, and the amount of frequency shift between the transmit signal and the reflected signal increases with time delay (distance). The time delay is thus a measure of the range; a small frequency spread is produced by nearby reflections, a larger frequency spread corresponds with more time delay and a longer range.
With the advent of modern electronics, digital signal processing is used for most detection processing. The beat signals are passed through an analog-to-digital converter, and digital processing is performed on the result.
The transmit signal x(t) of a saw-tooth FM-CW radar consists of one or multiple ramps (see figure). A single ramp starts with a frequency f_0 and increases linearly with slope \alpha. :f(t) = f_0 + \alpha t, The ramp ends after a duration T and has covered a bandwidth B = \alpha T.
During the time of a single ramp, the transmit signal is a scaled cosine. : x(t) = a_\mathrm{tx} \cos \left( \phi(t) \right) = a_\mathrm{tx} \cdot \cos \left( 2 \pi \left[f_0 + \frac{\alpha}{2}t \right] t \right) The instantaneous frequency is \frac{1}{2 \pi}\cdot \frac{\mathrm{d} \phi(t)}{\mathrm{d} t} = f(t)
The radar receives the signal y(t) which is a sum of K damped and delayed versions of the signal x(t). :: y(t) = \sum_{k=0}^{K-1} b_k x(t - \tau_k) The delays \tau_k denote the time a signal travels form the radar to an object and back to the radar. This time depends on the initial distance between the radar r and the object at time t=0, on the relative velocity v, and on the speed of light in the medium (with c'=c/n and n=1 in vacuum and n=1.0003 for air) :: \tau_k = \frac{2 r}{c'} - \frac{2 v}{c'} t
The radar mixes (multiplies) the received signal y(t) with the transmitted signal x(t) and applies a low-pass filter. The resulting ″deramped″ signal can be approximated as a sum of cosines. :: y_\mathrm{deramped}(t) \approx \sum_{k=0}^{K-1} a_\mathrm{tx} b_k \cos\left( 2 \pi f_{\mathrm b,k} t + \varphi_k \right) Each of these cosines corresponds to a path that the signal travelled from the radar to an object and back to the radar. The frequencies f_{\mathrm b,k} are called beat frequencies. :: f_{\mathrm{b},k} = \frac{2 \alpha r_k}{c'} - \frac{2 v_k f_\mathrm{c}}{c'}, The beat frequencies depend on the distance (range) r_k between radar and object k, on the speed of light, on the slope \alpha, the relative velocity v_k of object k with respect to the radar, and on the carrier frequency f_\mathrm{c} = f_0 + B/2.
Since the beat frequency contains the distance r_k to the object and the velocity v_k of the object, it is in general not possible to separate both quantities from a single transmitted saw-tooth only.
If the velocity is zero or if v f_\mathrm{c} is negligible compared to \alpha r_k, the distance can be computed via
r_\mathrm{max} = \frac{f_\mathrm{S} c'}{4 \alpha} = \frac{f_\mathrm{S} c' T}{4 B} The maximum unambiguous range depends on the sampling frequency f_\mathrm{S}, on the speed of light c', and on the frequency slope \alpha (or equivalently on the length T of the saw-tooth and the covered bandwidth B).
Without any additional information, an FM-CW radar with saw-tooth frequency modulation cannot distinguish between a distance r and a distance r' = r + n r_\mathrm{max}, for any integer n. Both distances would result in the same beat frequency. Usually, it is just assumed that only ranges r = 0 \ldots r_\mathrm{max} are present.
For practical reasons, receive samples are not processed for a brief period after the modulation ramp begins because incoming reflections will have modulation from the previous modulation cycle. This imposes a range limit and limits performance.
::\text{Range Limit} = 0.5 \ c' \ t_{radar} ,
Sinusoidal frequency modulation
Sinusoidal FM is used when both range and velocity are required simultaneously for complex objects with multiple moving parts like turbine fan blades, helicopter blades, or propellers. This processing reduces the effect of complex spectra modulation produced by rotating parts that introduce errors into range measurement process.
This technique also has the advantage that the receiver never needs to stop processing incoming signals because the modulation waveform is continuous with no impulse modulation.
Sinusoidal FM is eliminated by the receiver for close in reflections because the transmit frequency will be the same as the frequency being reflected back into the receiver. The spectrum for more distant objects will contain more modulation. The amount of spectrum spreading caused by modulation riding on the receive signal is proportional to the distance to the reflecting object.
The time domain formula for FM is:
: y(t) = \cos \left{ 2 \pi [ f_{c} + \Beta \cos \left( 2 \pi f_{m} t \right) ] t \right},
Ask Mako anything about Continuous-wave radar — get instant answers, deeper analysis, and related topics.
Research with MakoFree with your Surf account
Create a free account to save articles, ask Mako questions, and organize your research.
Sign up freeThis content may have been generated or modified by AI. CloudSurf Software LLC is not responsible for the accuracy, completeness, or reliability of AI-generated content. Always verify important information from primary sources.
Report